「オイラー角」の版間の差分
提供: tknotebook
| 17行: | 17行: | ||
これで、Z''軸(<math>{\boldsymbol e^{''}_3}</math>)の向きが定まります。Z''軸の向きは、xyz座標系において、<math>\phi</math>と<math>\theta</math>で表される極座標のベクトルの向きと一致しています。 | これで、Z''軸(<math>{\boldsymbol e^{''}_3}</math>)の向きが定まります。Z''軸の向きは、xyz座標系において、<math>\phi</math>と<math>\theta</math>で表される極座標のベクトルの向きと一致しています。 | ||
| − | Z-Y-Z オイラー角では、最後に、Z''軸(<math>{\boldsymbol e^{'}_2}</math>)を正方向に対して右に <math>\psi</math>だけ回します。こうして得られた新しい座標系の座標軸の方向ベクトルが <math>{\boldsymbol e^{'''}_1}</math>, <math>{\boldsymbol e^{'''}_2}</math>, <math>{\boldsymbol e^{'''}_3}</math>です。 | + | Z-Y-Z オイラー角では、最後に、Z''軸(<math>{\boldsymbol e^{''}_2}</math>)を正方向に対して右に <math>\psi</math>だけ回します。こうして得られた新しい座標系の座標軸の方向ベクトルが <math>{\boldsymbol e^{'''}_1}</math>, <math>{\boldsymbol e^{'''}_2}</math>, <math>{\boldsymbol e^{'''}_3}</math>です。 |
この<math>{\boldsymbol e^{'''}_1}</math>, <math>{\boldsymbol e^{'''}_2}</math>, <math>{\boldsymbol e^{'''}_3}</math>がオイラー角による回転後の座標系の座標軸の方向ベクトルです。 | この<math>{\boldsymbol e^{'''}_1}</math>, <math>{\boldsymbol e^{'''}_2}</math>, <math>{\boldsymbol e^{'''}_3}</math>がオイラー角による回転後の座標系の座標軸の方向ベクトルです。 | ||
2015年6月12日 (金) 11:24時点における版
座標の回転を表現する方法には様々な方法がありますが、座標軸を3回回転させるオイラー角が最もポピュラーな方法です。 オイラー角には、回す座標軸の順番によって12種類のバリエーションがあります。飛行機の姿勢を示すのに用いられ、z, y, x軸の順に座標軸を回転させるヨー・ピッチ・ロールが非常に有名ですが、ここでは物理で剛体の回転の説明などでよく持ちいられる Z-Y-Z オイラー角を説明します。

物理や数学で、Z-Y-Z オイラー角が用いられる理由の一つとしてあげられるのは、Z軸の倒し方が、3次元極座標のやり方と一致している点でしょう。
図中の方向ベクトル ,
,  ,
,  は、座標系の回転を行う前の座標系 xyz座標系の、x, y, z軸の方向ベクトルです。
は、座標系の回転を行う前の座標系 xyz座標系の、x, y, z軸の方向ベクトルです。
Z-Y-Z オイラー角では、まず、z軸()を正方向に対して右に  だけ回します。こうして得られた新しい座標系の座標軸の方向ベクトルが
だけ回します。こうして得られた新しい座標系の座標軸の方向ベクトルが  ,
,  ,
,  です。
です。
Z-Y-Z オイラー角では、次に、Y'軸()を正方向に対して右に  だけ回します。こうして得られた新しい座標系の座標軸の方向ベクトルが
だけ回します。こうして得られた新しい座標系の座標軸の方向ベクトルが  ,
,  ,
,  です。
です。
これで、Z軸()の向きが定まります。Z軸の向きは、xyz座標系において、とで表される極座標のベクトルの向きと一致しています。
Z-Y-Z オイラー角では、最後に、Z軸()を正方向に対して右に  だけ回します。こうして得られた新しい座標系の座標軸の方向ベクトルが
だけ回します。こうして得られた新しい座標系の座標軸の方向ベクトルが  ,
,  ,
,  です。
です。
この, , がオイラー角による回転後の座標系の座標軸の方向ベクトルです。
この回転で、元の座標軸の方向ベクトル, , を回転後の座標系の座標軸の方向ベクトル, , へ移す行列は
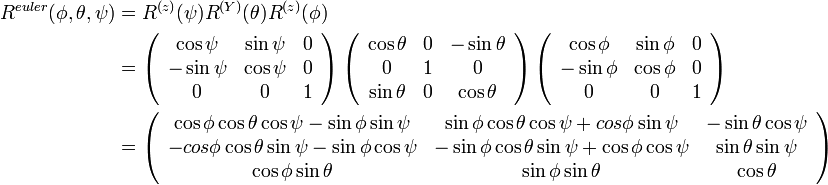
|
( 1 ) |